Gateway Cities Technology Plan for Goods Movement
Metro and the Gateway Cities Council of Governments prepared the Gateway Cities Technology Plan for Goods Movement that outlines a comprehensive program to leverage technology to improve the efficiency of goods movement in the Gateway Cities subregion. The intent is to enhance productivity and better utilize existing and future transportation resources, and to support the sustainability goals of the region. Next steps identified in the plan include autonomous truck research, concept of operations for the I-710 Freight Corridor, Truck Enforcement Network (TEN), freeway and arterial smart corridors, and truck traveler information upgrades. The following projects have evolved from the Technology Plan in the Los Angeles Region.
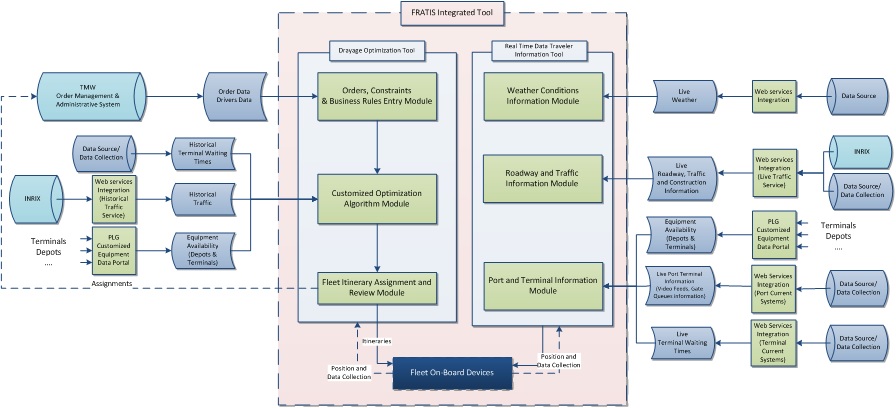
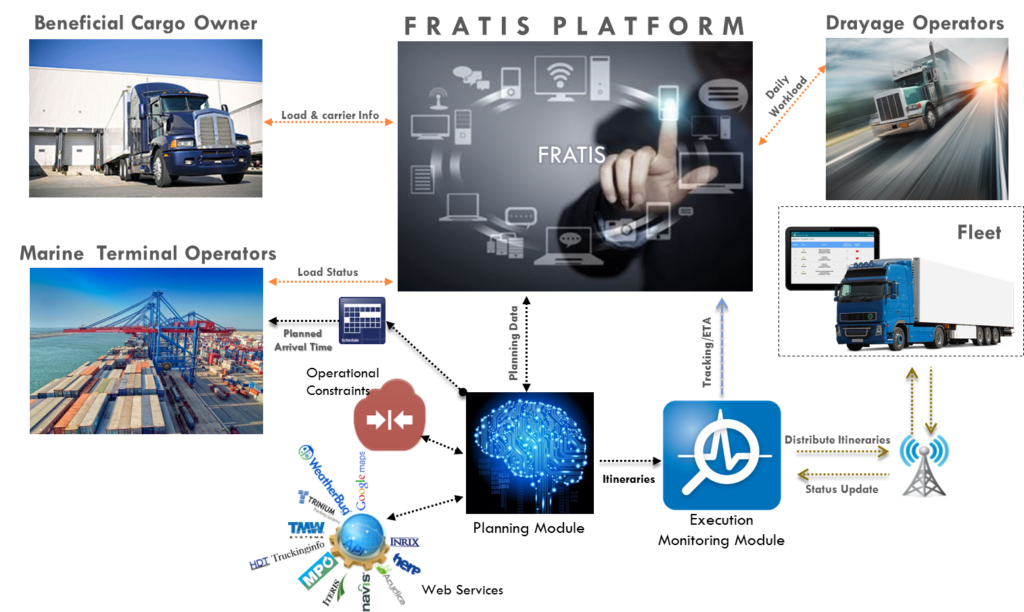
FRATIS
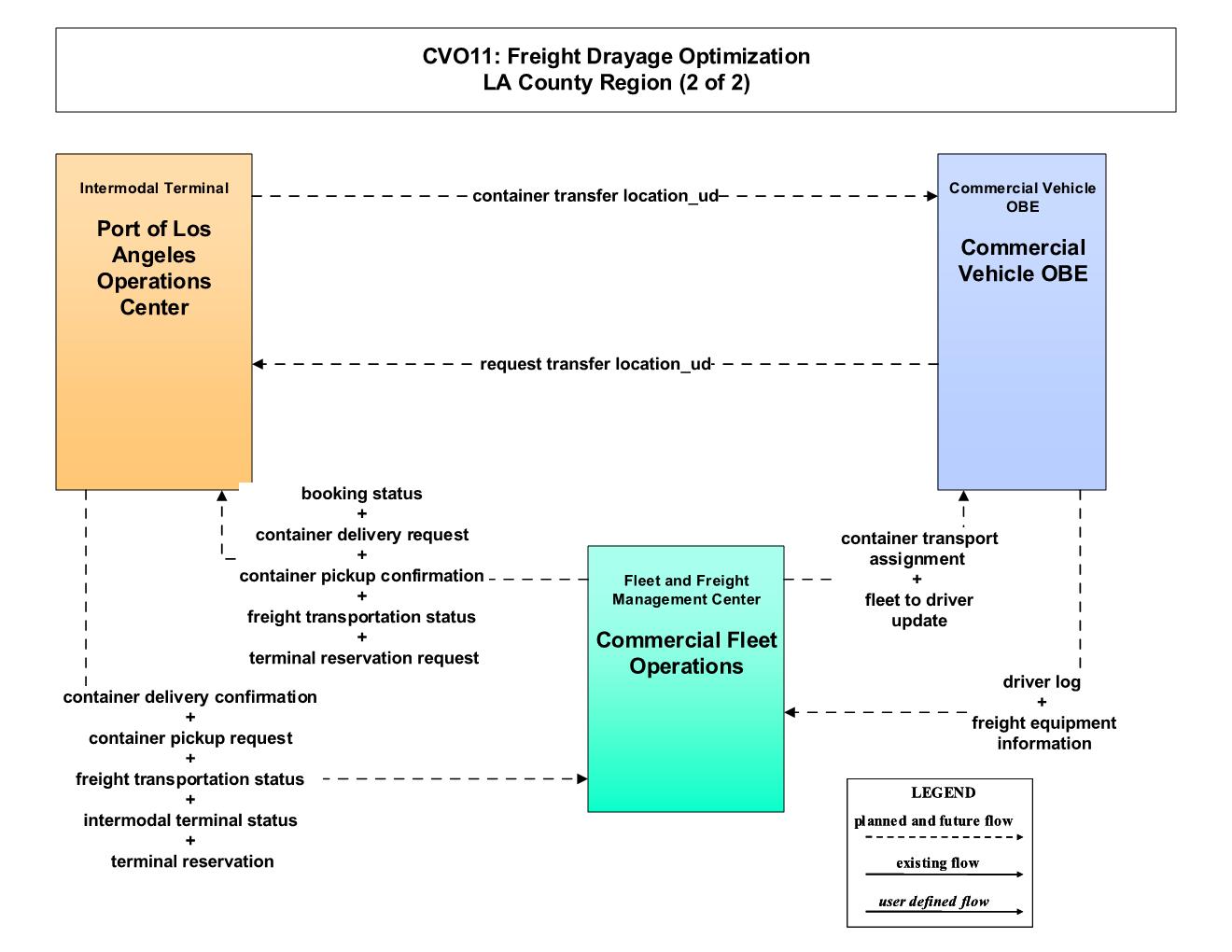
FRATIS integrates and augments existing regional ITS and private sector traffic data sources to provide freight-centric real-time information to support improved truck routing and dispatcher decision making. FHWA provided funding for a demonstration project of FRATIS at the Port of Los Angeles (Phase 1), with one marine terminal operator (MTO) and one drayage company, approximately 50 trucks. The demonstration showed improvement in logisitic efficiency for the drayage company, reduced idle times, and reduced fuel costs. With the success from Phase 1 FRATIS, FHWA provided additional funding for Phase 2, which extended the project scope to 3 MTO's and 5 drayage companies (including a Beneficial Cargo Owner (BCO), and approximately 250 trucks.)
DrayFLEX
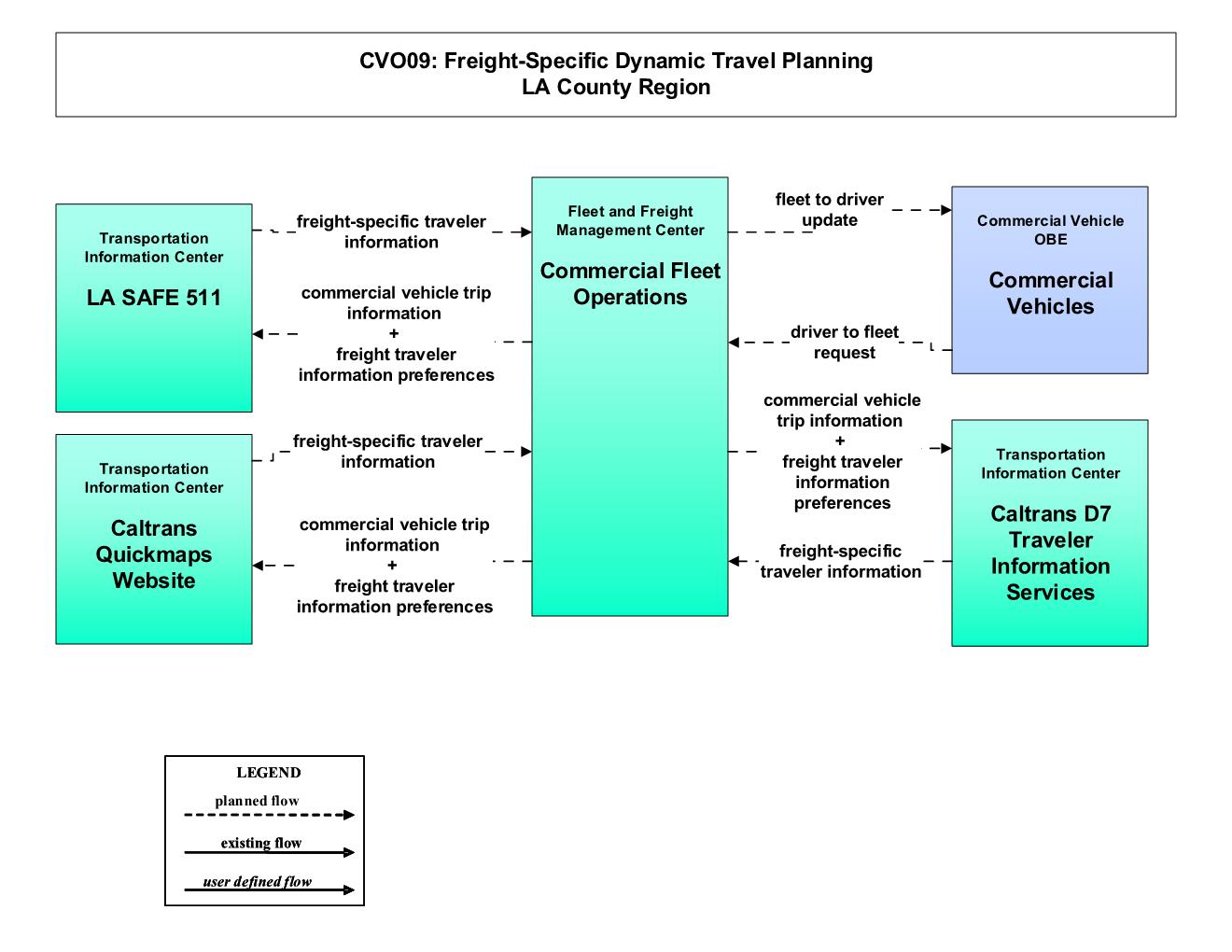
Metro is leading the FRATIS Modernization project, with is now called Drayage, Freight, and Logistics Exchange (DrayFLEX). DrayFLEX will build off previous FHWA FRATIS deployments and make enhancements to the existing FHWA FRATIS architecture, in addition to exploring connected vehicle technology applications. It will provide freight-specific dynamic travel planning information in order to improve container movement in and around the Ports of Los Angeles and Long Beach.
DrayFLEX will use information from the marine terminal operators, trucking companies, and traveler information systems to provide status updates on container availability, enable trucking companies to set up automated appointments, and provide truck drivers the best routes to use to and from the ports. The project will include an implementation period of two years and a plan for private-sector commercialization.
Partial Automation of Truck Platooning
Caltrans was recently awarded a $1.6 million grant under the FHWA's Exploratory Advanced Research Program (EARP) to study and pilot partially automated truck platooning. Metro is working with Caltrans, GCCOG, UC Berkeley Partners for Advanced Transportation Technology (PATH), Cambridge Systematics, Volvo Technology of America, and Peloton Technology on this effort. This project is a major stepping stone on the path to advance truck platooning technology. The goal of this project is to augment existing adaptive cruise control technology with the addition of vehicle to vehicle communications to allow for close proximity truck platooning. As part of this effort, Metro and GCCOG will be working with Caltrans to simulate the truck platooning concept and technology on the I-710 corridor where dedicated truck lanes are currently being evaluated. This project went beyond research and simulation, and culminated in the demonstration of automated truck platooning in Los Angeles County in March 2017.
Lead Agencies
Gateway Cities COG
Metro
Port of Long Beach
Port of Los Angeles
Caltrans
Associated Stakeholders
Commercial Vehicle Companies
LA County
Travelers
ITS Services
CVO01 Carrier Operations and Fleet Management (Operate)- Airports
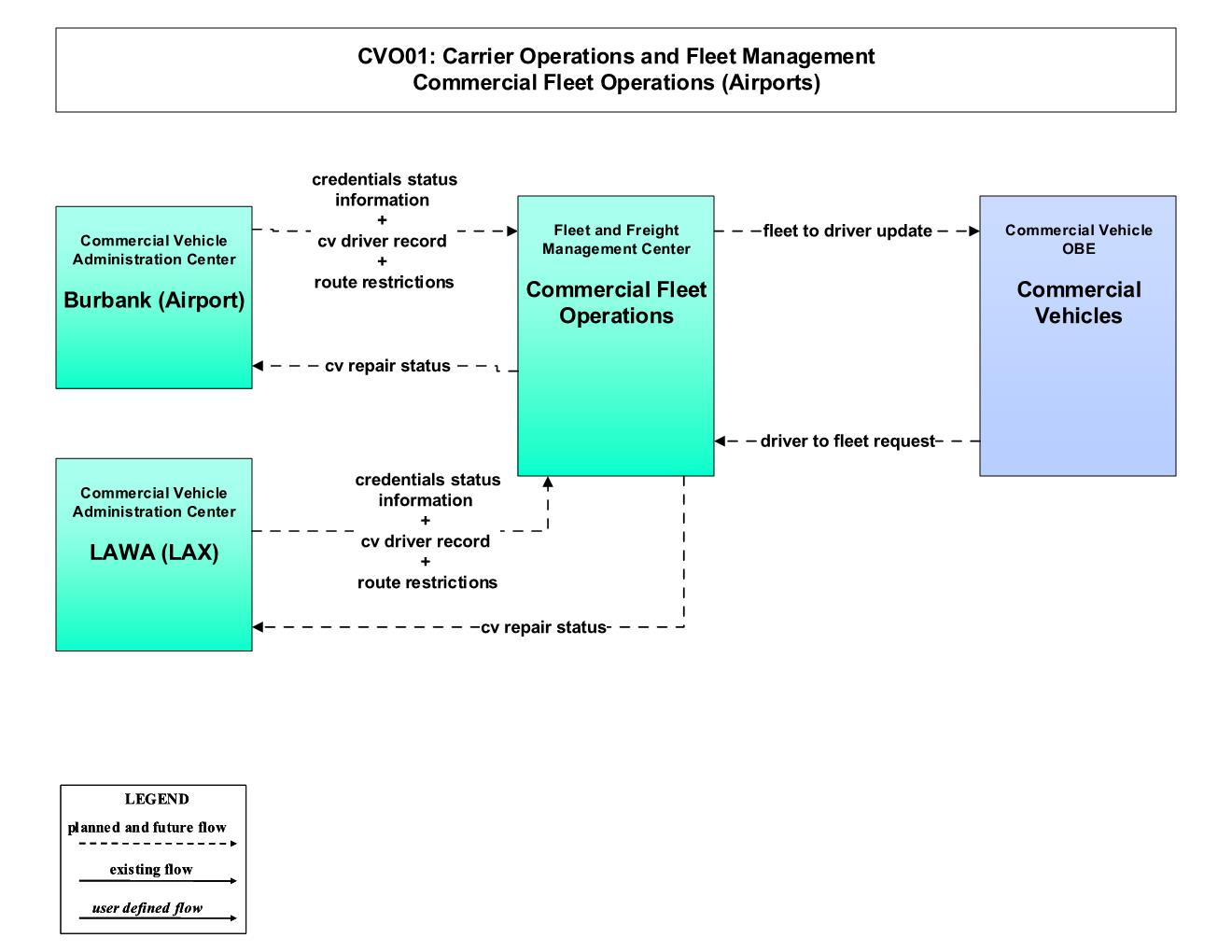{kind=link}
CVO01 Carrier Operations and Fleet Management (Operate)- PortsCVO09 Freight-Specific Dynamic Travel Planning (Planned)- LA County Region
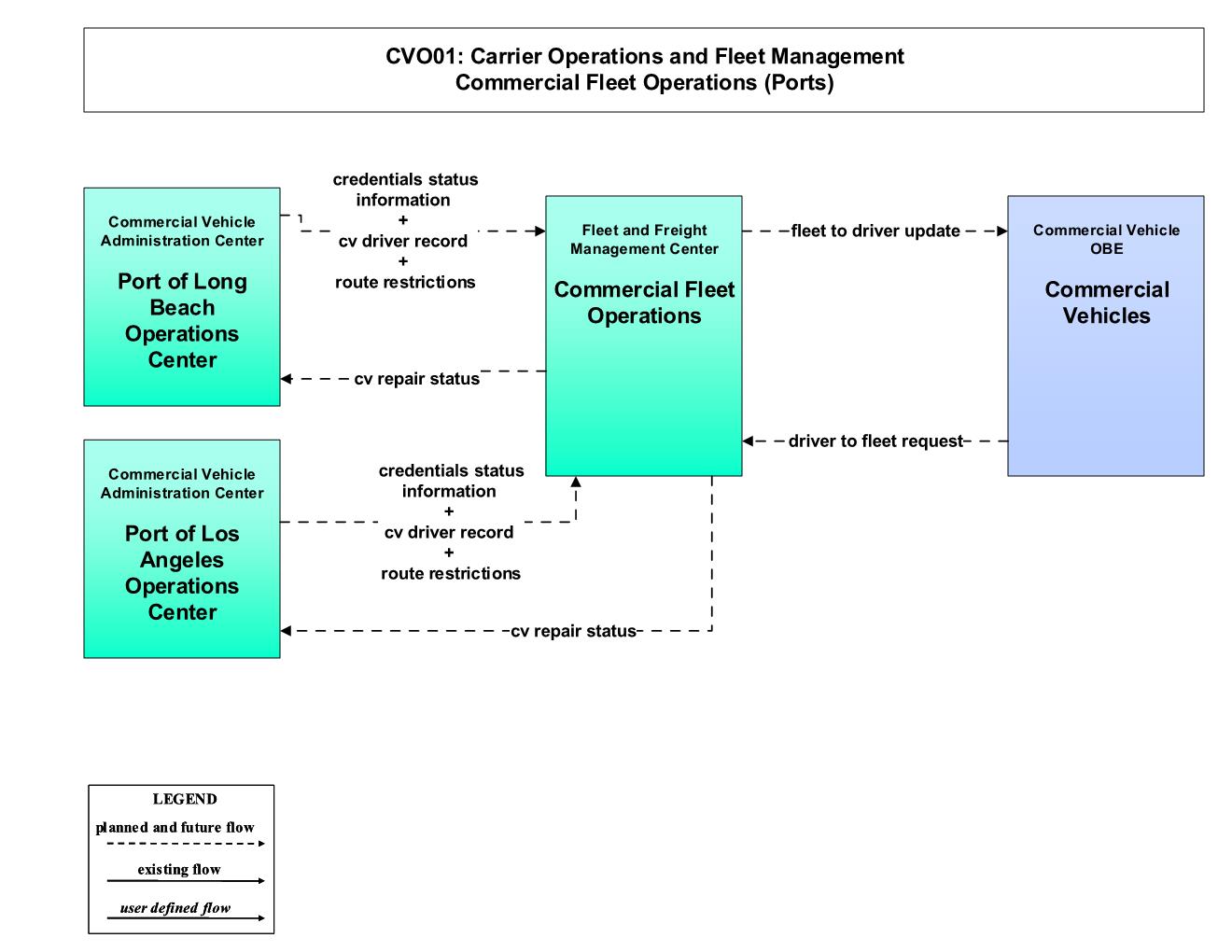{kind=link}
{kind=link}
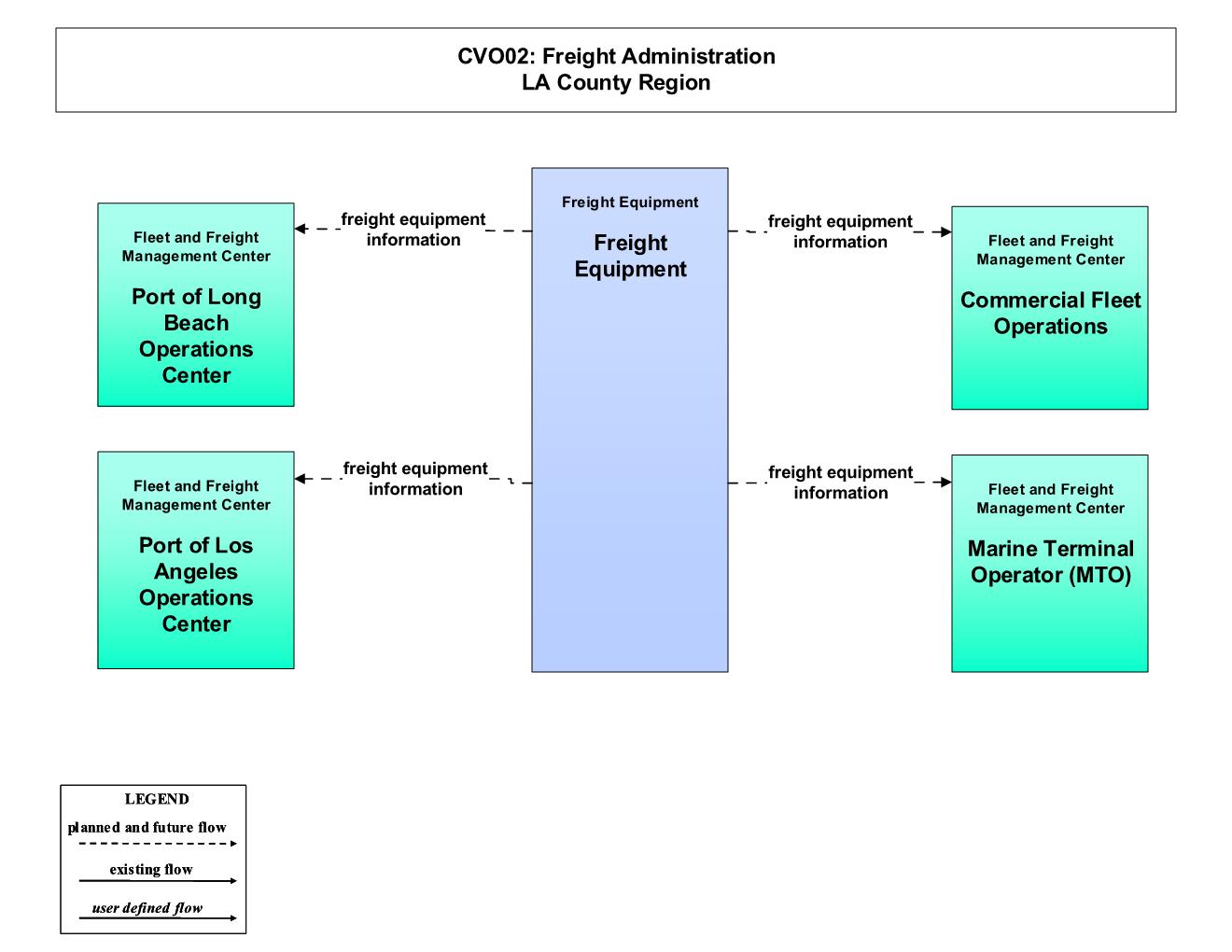
CVO02 Freight Administration (Operate)-Region
{kind=link}
CVO09 Freight-Specific Dynamic Travel Planning (Planned)- LA County Region
{kind=link}
{kind=link}